
Build, simulate, and deploy production grade autonomous robotics systems using Physical AI, ROS 2, and NVIDIA Isaac, validated end-to-end in simulation.
Delivered in partnership with NVIDIA · Powered by AuraSim
Robotics is shifting from rule based systems to model-driven intelligence.Most teams struggle to validate perception, navigation, and manipulation safely before deployment.This program exists to close that gap using simulation first,productionready Physical AI workflows.Robotics is shifting from rule based systems to model-driven intelligence.Most teams struggle to validate perception, navigation, and manipulation safely before deployment.This program exists to close that gap using simulation first,productionready Physical AI workflows.
Captures spatial, physical, and contextual dynamics of complex environments.
Emulates real world inputs (e.g. cameras, LiDAR, force sensors) and hardware behavior with precision.

Stress test navigation, manipulation, and edge case logic in synthetic but realistic scenarios.
Train models, run multi agent scenarios, and iterate faster entirely in the cloud.
Bridging the gap between synthetic training and real world performance through adaptive simulation.






From idea to deployment, AuraML & Nvidia physical AI developer program lets you simulate environments, train autonomy, and validate robotic systems virtually with unprecedented speed and precision.
connects your robotics stack with a generative simulation engine that accelerates development across perception, planning, and control.
Digitally recreate your environment from warehouses to assembly lines using natural language or floorplans, ready for instant simulation.
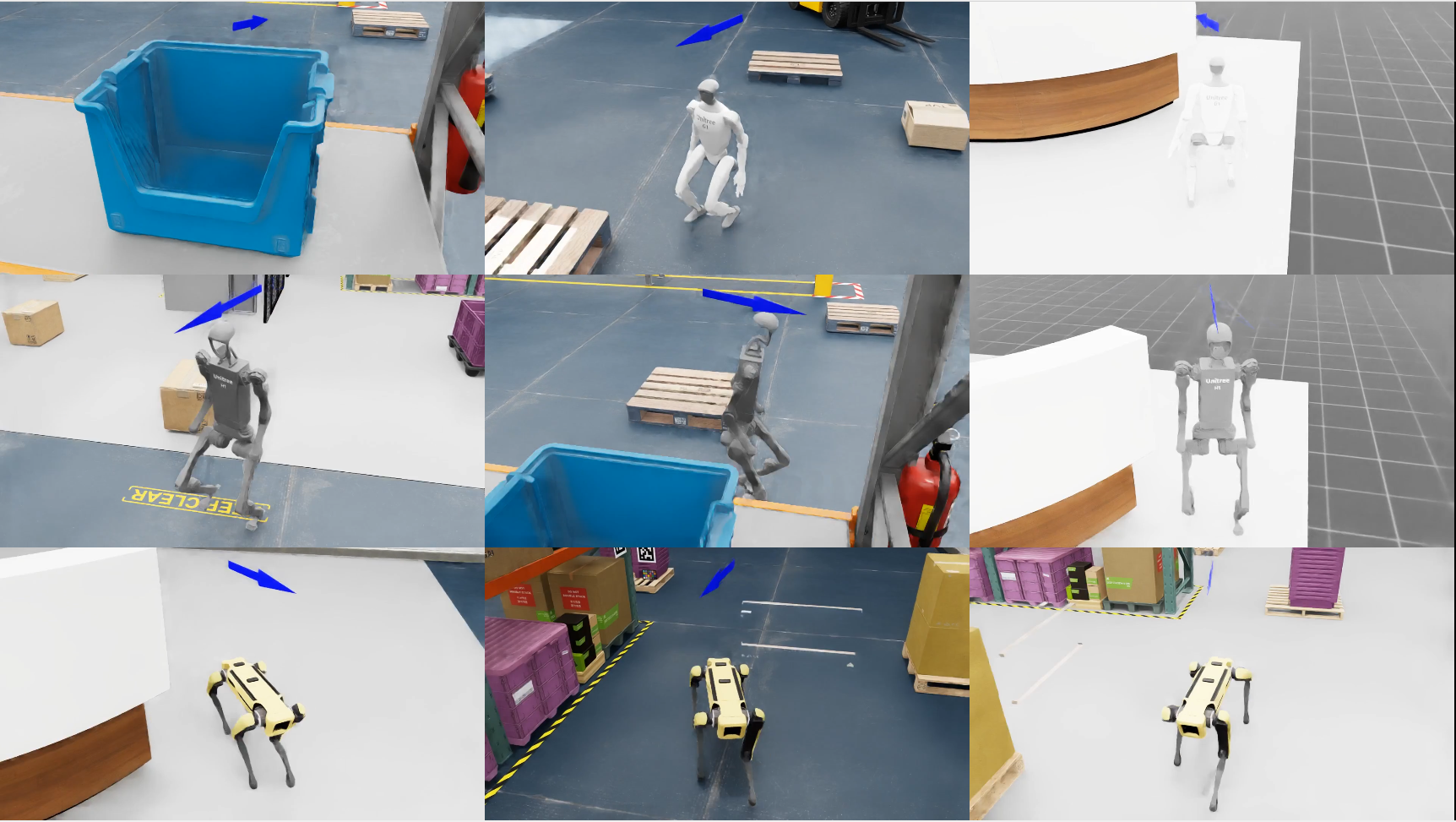
Simulate diverse real-world scenarios and edge cases to train, test, and validate navigation, manipulation, and safety systems.
Iterate faster with sensor-accurate feedback and cloud-based validation workflows. Move from sim to site in a fraction of the time.
Seamlessly transfer learnings from simulation to real-world systems. Reduce on-site calibration and deployment risks with high-fidelity modeling.
Digitally recreate your environment from warehouses to assembly lines using natural language or floorplans, ready for instant simulation.
Simulate diverse real-world scenarios and edge cases to train, test, and validate navigation, manipulation, and safety systems.
Iterate faster with sensor-accurate feedback and cloud-based validation workflows. Move from sim to site in a fraction of the time.
Seamlessly transfer learnings from simulation to real-world systems. Reduce on-site calibration and deployment risks with high-fidelity modeling.
Focus: System‑level understanding
Topics
1. What is Physical AI (vs classical robotics)
2. Modern robotics stack (simulation → data → policy → deployment)
3. Where AuraSim, Isaac Sim, Omniverse, ROS 2 fit
4. Why simulation is the bottleneck in robotics
Hands on:
1. AuraSim environment walkthrough
2. Generating first industrial scene (factory / warehouse)
Outcome: Clear mental model of end‑to‑end robotics systems
Focus: Generative robotics environments
Topics:
1. USD fundamentals
2. Omniverse scene graph & physics
3. AuraSim generative assets & worlds
4. Domain randomization for robotics
Hands on
Generate multiple factory layouts
Import scenes into Isaac Sim
Outcome: Simulation ready robotics environments
Focus: Making robots move correctly
Topics
1. Robot types: arms, cobots, AMRs
2. URDF/USD robots
3. Forward & inverse kinematics
4. Joint limits, constraints, controllers
Hands on
1. Import industrial arm & mobile robot
2. Validate kinematics in Isaac Sim
Outcome: Robots with correct motion & control
Focus: How robots see
Topics
1. Camera models (RGB, depth, stereo)
2. LiDAR & radar simulation
3. Proprioception & force/torque sensors
4. Synthetic data generation
Hands on
1. Configure multi sensor robot
2. Generate labeled perception datasets using AuraSim
Outcome: Sensor‑accurate perception pipelines
Focus: Industry middleware & data flow
Topics
1. ROS 2 architecture (nodes, topics, DDS)
2. Isaac Sim ↔ ROS 2 bridge
3. TF trees & coordinate frames
4. Sensor fusion basics (vision + LiDAR)
Hands on
1. ROS 2 integration with simulated robot
2. Fuse camera + LiDAR data for localization
Outcome: ROS‑native robotics systems
Focus: Autonomy for moving robots
Topics
1. Localization & mapping (SLAM concepts)
2. Navigation stacks
3. Obstacle avoidance
4. Simulation‑based stress testing
Hands on
1. AMR navigation in generated warehouse
2. Multi‑scenario testing via AuraSim
Outcome: Robust navigation pipelines
Focus: Physical interaction
Topics
1. Grasping fundamentals
2. Motion planning
3. Vision‑guided manipulation
4. Reachability & collision analysis
Hands on
1. Pick‑and‑place task in factory cell
2. Vision‑driven manipulation
Outcome: Industrial‑grade manipulation skills
Focus: Intelligence & real‑world readiness
Topics
1. Groot & embodied foundation models
2. Vision‑Language‑Action (VLA) concepts
3. Training a mini VLA model
4. Sim‑to‑real gaps & validation
Hands on
1. Train mini VLA using synthetic data
2. Validate behavior across scenarios
Outcome: Intelligent, adaptable robot behaviors
Options
1. Industrial arm with vision guided manipulation
2. AMR with autonomous navigation
3. Physical AI robot responding to language commands
Requirements
1. AuraSim generated world
2. Isaac Sim validation
3. ROS 2 integration
4. Sensor fusion (minimum two sensors)
5. Final demo + technical report
Outcome: Portfolio grade, production oriented robotics project
Participants finish with a portfolio grade, production ready robotics system.
Run thousands of parallel simulations on the cloud, scale your training pipeline, and access via web or API.
AI engineers entering robotics, Robotics & automation engineers
ROS developers, Omniverse / Isaac users
Research labs and universities advancing robotics AI
Industrial teams needing fast, realistic simulation for training & testing

Early Access to AuraSIM: Get hands on with unreleased capabilities and influence how new features evolve.
Dedicated Support & Onboarding: Work closely with our engineering team to integrate AuraSIM & Nvidia Stack into your existing stack.
Joint R&D Opportunities: Co-develop custom scenarios, sensors, or interfaces tailored to your domain.
Showcase & Visibility: Be featured as a design partner in case studies, demos, and global conferences.
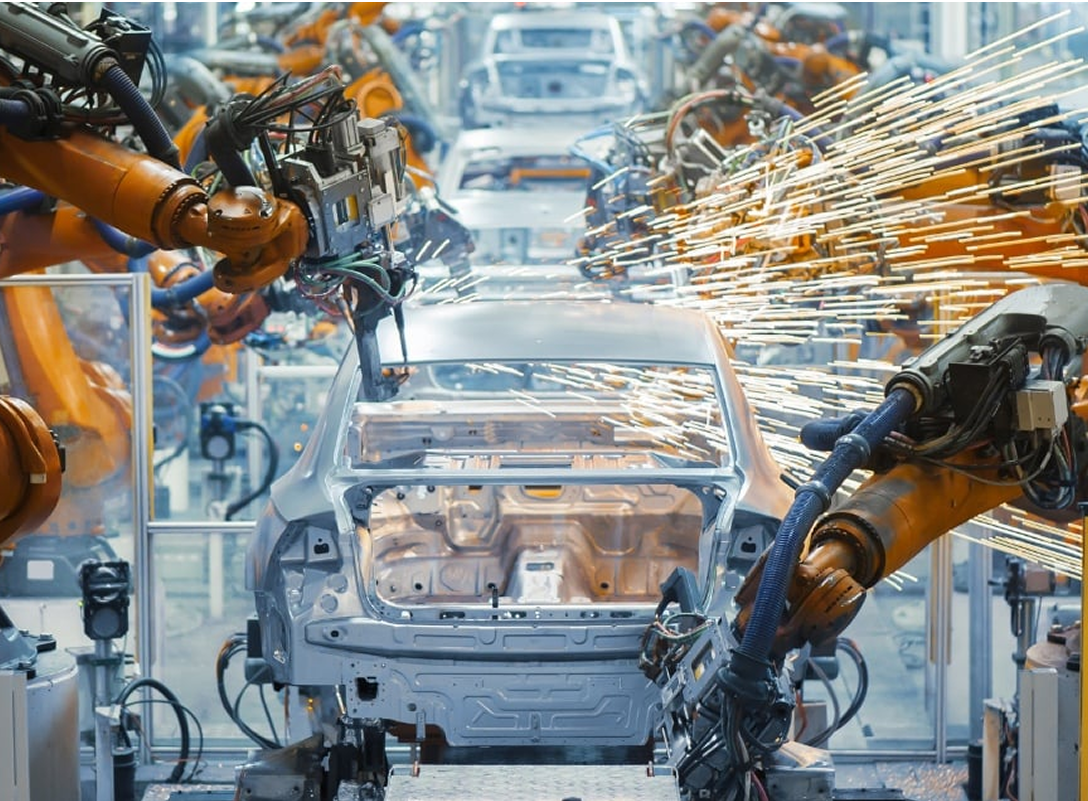
Robotic Arms (welding, assembly)
SCARA & Delta Robots (pick-and-place)
CNC-Integrated Bots
Mobile Manipulators
Validate assembly workflows
Train in precise, multi step operations
Run HRI and fault-handling scenarios
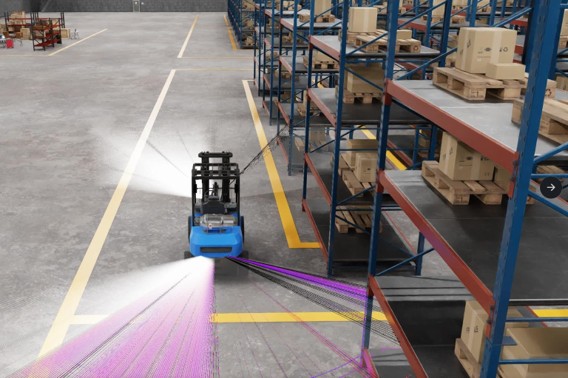
AMRs & AGVs
Sorting Robots
Pick and Place Vision Bots
Palletizers
Optimize fleet coordination
Test last meter navigation
Run HRI and fault handling scenarios
UGVs and UAVs
Recon Drones
Surveillance Crawlers
Tethered Inspection Units
Test in tactical or unstructured terrain
Validate mission logic
Train multi agent recon and AI perception

Harvesting Robots
Autonomous Tractors
Drones for crop monitoring
Weeding/irrigation platforms
Simulate terrain and crop variability
Train plant health monitoring AI
Precision farming scenario testing
Pipeline Crawlers
Substation Maintenance Bots
Wind Turbine Inspectors
Underwater ROVs
Wall Climbing Robots
Hazard modeling (heat, wind, pressure)
Validate remote maintenance operations
Train vision and control in extreme environments

Instructor team

Robotics Engineer with 10+years building autonomous systems, Ex-Founding Engineer at AjnaLens, Senior Engineer at Rapyuta Robotics. MS in Robotics from Northwestern University

Robotics Engineer with 4 years experience working for DeepX Robotics. Experienced building simulators and CI/CD pipelines for robotic excavators. IIT Dhanbad B.tech.

Robotics simulation developer with 8 years of experience building robotics simulation platforms for various companies with automated deploymentand CI/CD integration. Winner of two NASA roboticscompetitions. etur adipiscing elit.

It is a live, hands on developer program focused on building production-grade robotics systems using Physical AI, ROS 2, AuraSim, and NVIDIA Isaac.The program emphasizes simulation-first development, system validation, and deployment-ready workflows.
This is a live, cohort based program. Sessions are instructor-led with real-time walkthroughs, hands-on labs, and weekly practical assignments.
By the end of the program, you will have built and validated:
All work is validated using AuraSim and NVIDIA Isaac Sim.
Basic familiarity with robotics concepts (frames, sensors, joints) and Python is recommended.Prior experience with ROS, Isaac, or Omniverse is helpful but not mandatory.
No. All participants receive access to an end-to-end managed NVIDIA GPU cloud environment. You only need a stable internet connection and a modern laptop.
The program uses: AuraSim, NVIDIA Omniverse, NVIDIA Isaac Sim & Isaac ROS, ROS 2, PyTorch, Open-source Physical AI and VLA models.
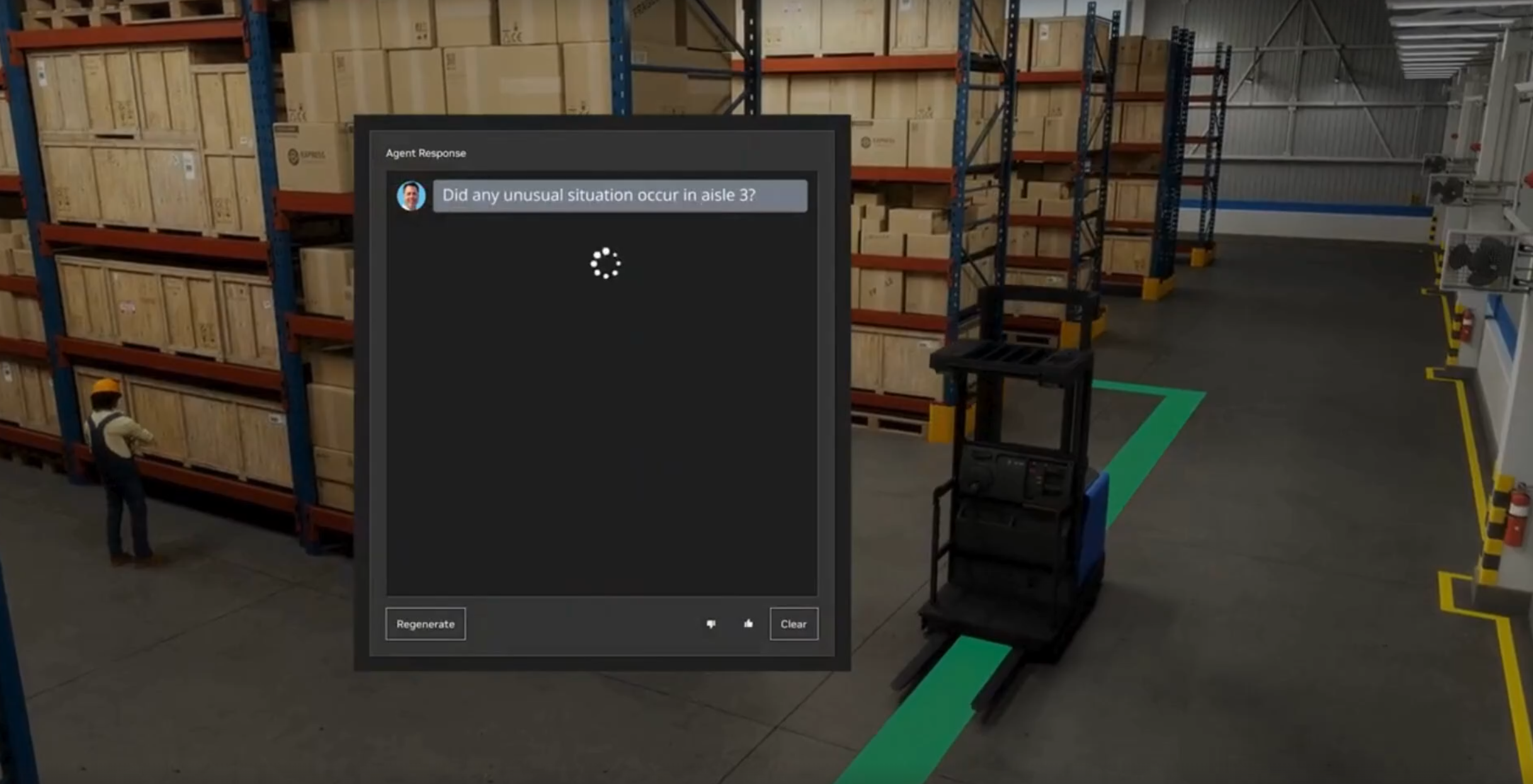
AuraSim is AuraML’s generative, sensor-accurate simulation platform.
It is used to: Generate realistic environments, Validate perception, navigation, and manipulation, Perform sim-to-real testing before deployment, Participants receive free AuraSim access during the program.
Duration: 8 - 12 weeks
Sessions: 2 - 3 live sessions per week
Time commitment: ~5 - 7 hours per week (including labs and assignments)
Participants who successfully complete the program receive: AuraML + NVIDIA Co-Certified Physical AI & Robotics Developer Certificate
Verifiable credential ID
LinkedIn-ready certification badge
Yes. The program is delivered in partnership with NVIDIA, using NVIDIA Omniverse, Isaac Sim, Isaac ROS, and NVIDIA GPU powered cloud infrastructure.
Yes. The program is designed around industry aligned tooling and workflows used by real robotics teams, making it relevant for roles in:
The fee includes live instruction, cloud access, AuraSim access during the program, and joint certification.
Each cohort is limited to 150 engineers to ensure high-quality interaction and hands-on support.
Limited to 150 engineers per batch to ensure high quality interaction and hands-on support.


.png)
